
智能AGV小车驱动轮是AGV小车的核心部件之一,负责提供行驶动力和导向控制。驱动轮通过电机提供动力,并配备转向机构以控制行驶方向。其性能参数如载重能力、运行速度、转向精度等,对AGV的整体性能有重要影响。
智能AGV小车驱动轮是AGV小车的核心部件之一,负责提供行驶动力和导向控制。驱动轮通过电机提供动力,并配备转向机构以控制行驶方向。其性能参数如载重能力、运行速度、转向精度等,对AGV的整体性能有重要影响。为确保正常运行,需定期对驱动行走轮进行清洁、润滑和检查,及时更换磨损部件,并调整其张紧度和位置。
智能AGV小车的驱动轮类型多样,每种类型都有其独特的特点和适用场景,主要包括:
1、单舵轮型
结构特点:多为三轮车型,前部安装一个铰轴转向车轮作为驱动轮,搭配后两个从动轮。
优点:结构简单、成本低,三轮结构的抓地性好,对地表面要求一般,适用于广泛的环境和场合。
缺点:灵活性相对较差,转向存在转弯半径,能实现的动作相对简单。
适用场景:主要适用于牵引式AGV和叉车式AGV,在大吨位货物搬运场景中表现出色。
2、双舵轮型
结构特点:全向型AGV,车体前后各安装一个舵轮,搭配左右两侧的从动轮。
优点:可以实现360°回转功能和万向横移,灵活性高,具有精确的运行精度。
缺点:两套舵轮成本较高,对电机的运动控制算法要求较高,且由于四轮或以上的车轮结构,容易导致一轮悬空而影响运行,对地面平整度要求严格。
适用场景:适用于重载潜伏式AGV或停车机器人,在汽车制造工厂、停车场等场景中表现出色。
3、差速轮型
结构特点:车体左右两侧安装差速轮作为驱动轮,其他为随动轮。差速轮不配置转向电机,完全靠内外驱动轮之间的速度差来实现转向。
优点:灵活性高,同样可实现360°回转。
缺点:差速轮本身不具备转向性,无法做到万向横移。
适用场景:适用于环境较好的电商、零售等仓库场景,如亚马逊KIVA机器人就采用了这种驱动方式。
4、麦克纳姆轮型
结构特点:轮毂上安装斜向辊子,通过协同运动以实现移动或旋转。
优点:具有10吨以上的载重能力,灵活性高,可以实现360°回转功能和万向横移,更适合在高精度要求及有限空间内的运动。
缺点:成本相对较高,结构形式相对复杂,对控制、制造、地面的要求也较高。
适用场景:适用于飞机、高铁等生产制造场景以及户外机器人运输场景。
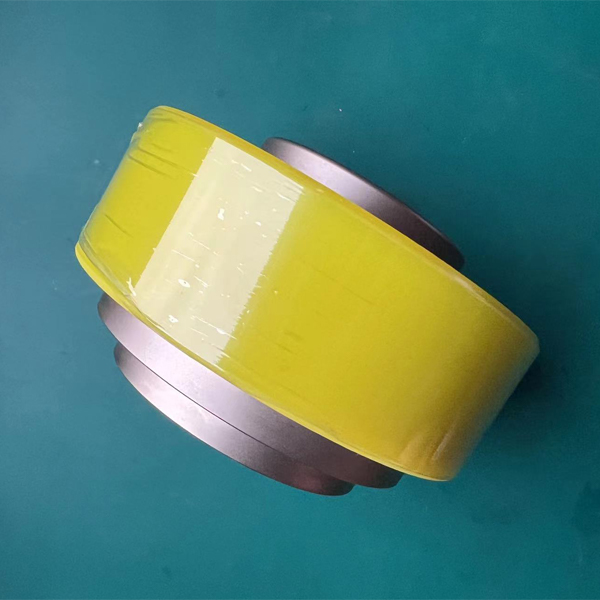
智能AGV小车驱动轮
以常见的单舵轮型AGV为例,其驱动行走轮的工作原理如下:
动力来源:驱动行走轮通过内置的电机(如AC驱动电机)提供动力。
转向控制:通过转向电机和行星减速机等部件,控制驱动行走轮的转向。
行走控制:根据AGV的导引系统(如导向传感器、控制面板等)提供的指令,驱动行走轮按照预定的路径和速度行驶。
智能AGV小车的驱动行走轮通常包含以下关键部件:
驱动电机:提供行走动力。
转向电机:控制驱动行走轮的转向。
行星减速机:提高电机的输出扭矩,降低转速,实现平稳驱动。
齿轮箱:传递动力,改变转速和方向。
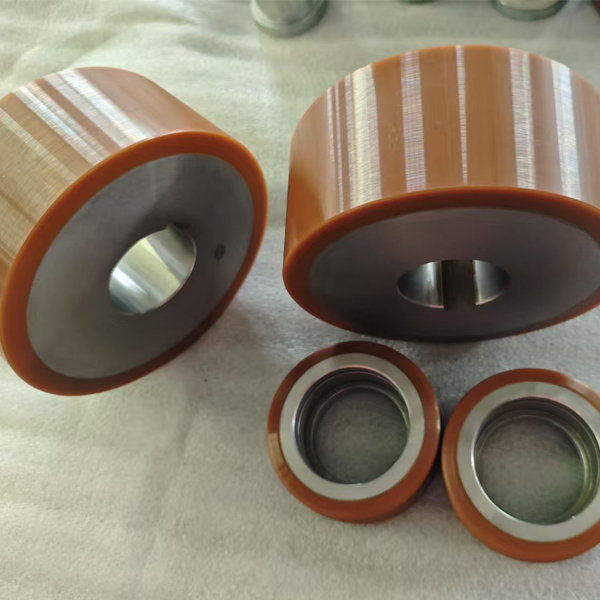
行走轮:与地面接触,实现AGV的移动。通常采用聚氨酯等材料制成,具有良好的耐磨性和抓地性。
智能AGV小车的驱动行走轮的性能参数直接影响其运行效率和稳定性,主要包括:
载重能力:根据AGV的设计和应用场景,驱动行走轮需要具备一定的载重能力。
运行速度:驱动行走轮的运行速度决定了AGV的工作效率。通常,AGV的运行速度可调节,以适应不同的搬运需求。
转向精度:驱动行走轮的转向精度影响AGV的行驶轨迹和定位准确性。
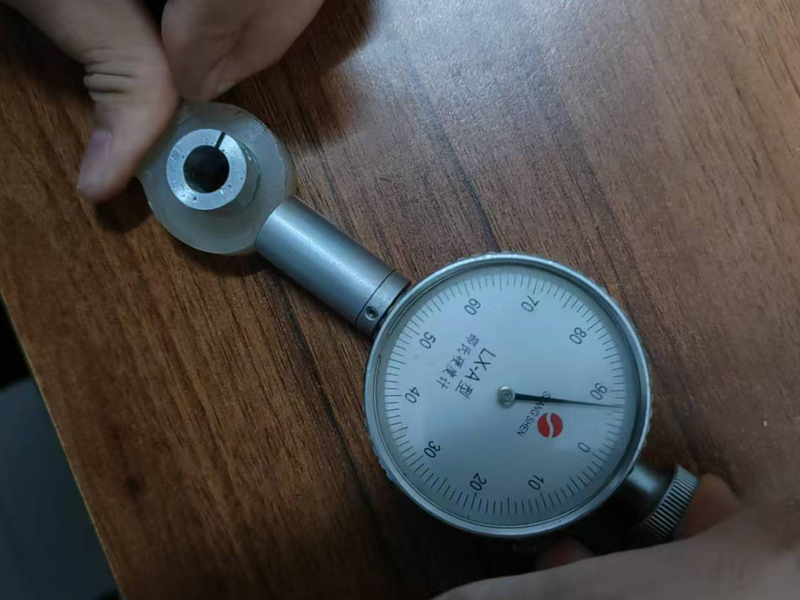
耐磨性:行走轮与地面频繁接触,需要具备良好的耐磨性,以延长使用寿命。
为了确保智能AGV小车的正常运行,需要定期对驱动行走轮进行维护和保养,主要包括:
清洁:定期清理行走轮表面的污垢和杂物,保持其清洁。
润滑:对行走轮的轴承等部件进行定期润滑,减少摩擦和磨损。
检查:定期检查行走轮的磨损情况,及时更换磨损严重的部件。
调整:根据AGV的运行情况,适时调整行走轮的张紧度和位置,确保其正常运行。
总结来看,智能AGV小车的驱动行走轮是其实现自主移动、物料搬运的关键部件。根据应用场景和需求的不同,可以选择不同类型的驱动行走轮。同时,定期维护和保养驱动行走轮,可以确保其正常运行和延长使用寿命。








Copyright ©2024-2025 昆峰重工(苏州)有限公司 版权所有 网站地图


聚氨酯包胶轮